System overview: to obtain large numbers of high quality matches, we compute bilateral motion fields according to noisy hypothesis set, and use the model to validate hypothesized matching without nearest neighbor thresholding.
Abstract
This paper suggests modeling motion in a bilateral domain that augments spatial information with the motion itself. We use the bilateral domain to reformulate a piecewise smooth constraint as continuous global modeling constraint. The resultant model can be robustly computed from highly noisy scattered feature points using a global minimization. We demonstrate how the model can reliably obtain large numbers of good quality correspondences over wide baselines, while keeping outliers to a minimum.
Papers
Bilateral Functions for Global Motion Modeling, Wen-Yan Lin, Ming-Ming Cheng, Jiangbo Lu, Hongsheng Yang, Minh Do, Philip Torr, ECCV, 2014. [pdf] [bib] [project page]
Robust Non-parametric Data Fitting for Correspondence Modeling, Wen-Yan Lin, Ming-Ming Cheng, Shuai Zheng, Jiangbo Lu, Nigel Crook, IEEE International Conference on Computer Vision (IEEE ICCV), 2013. [Project page] [pdf] [bib] [Official version]
Sample Results
An example of our global method for finding correspondences. Circles represent feature locations and lines their motion. a) Noisy feature correspondence (inliers highlighted in dark blue). b) Our global model eliminates outliers. The model is directly computed from the noisy matches in (a). c) The global model allows us to robustly expand the set of matches.
Recall and % outliers between image pairs, with varying algorithm parameters (diamonds indicate default parameters). Occ [25] is the baseline. The recall value where the curves first intersect outliers = 0 represents the maximum number of inliers that can be retained if no outliers are tolerated. Apart from highly repetitive scenes (blue and red curves), our curves are vertical lines on the outliers = 0 axis. Our default parameters provide over 90% recall with no outliers for many scenes.
We compared our results against epipolar RANSAC [34] and MLESAC [35], implemented by [36]. We also evaluated piecewise homographic RANSAC (RCM homo) [18] and Occ [25], run at their default parameters.
Applications
1. Rich correspondence estimation
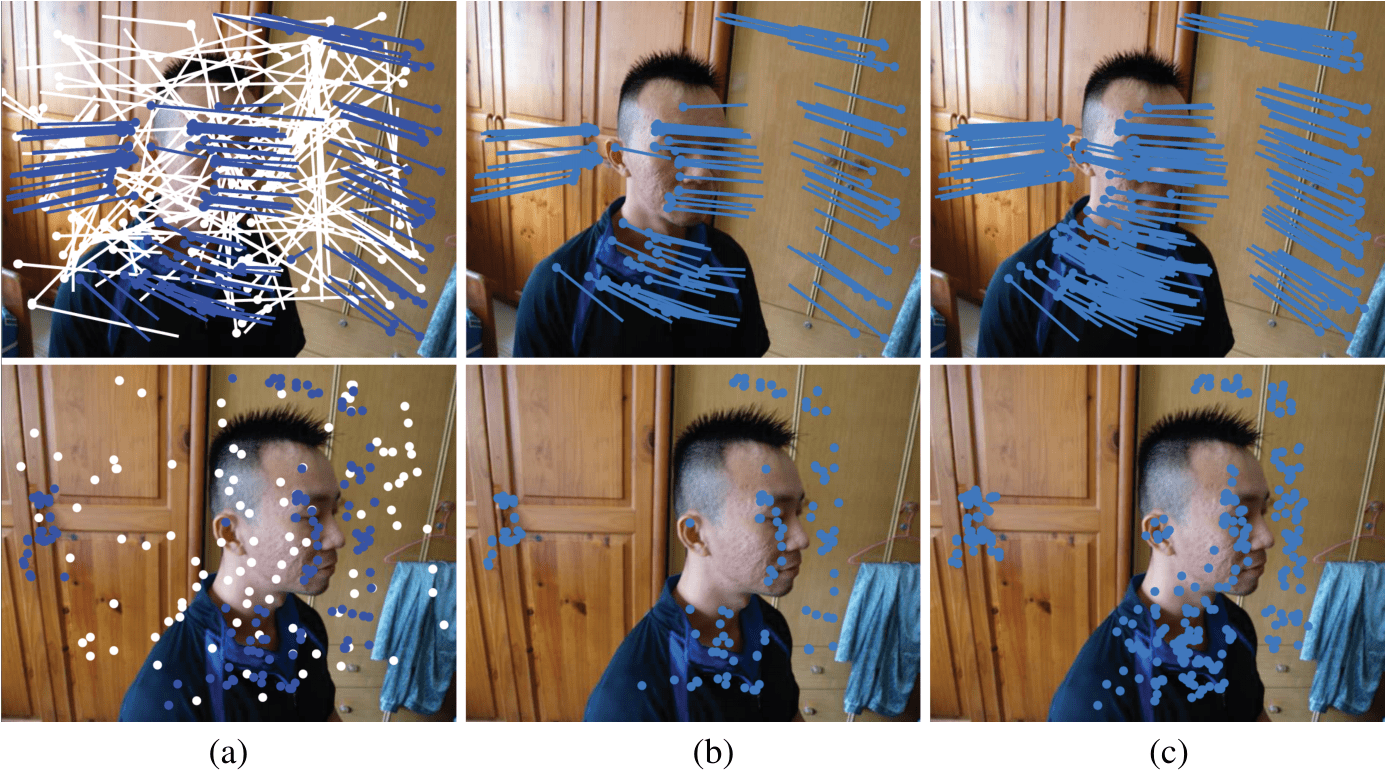
Top: two views of half-dome, taken a few miles apart, causing parallax in the foreground. Bottom: an office scene with re-arranged stationary. Observe that our algorithm provides many more matches and fewer outliers than standard A-SIFT.
2. Drift-Free Multi-Image Correspondence
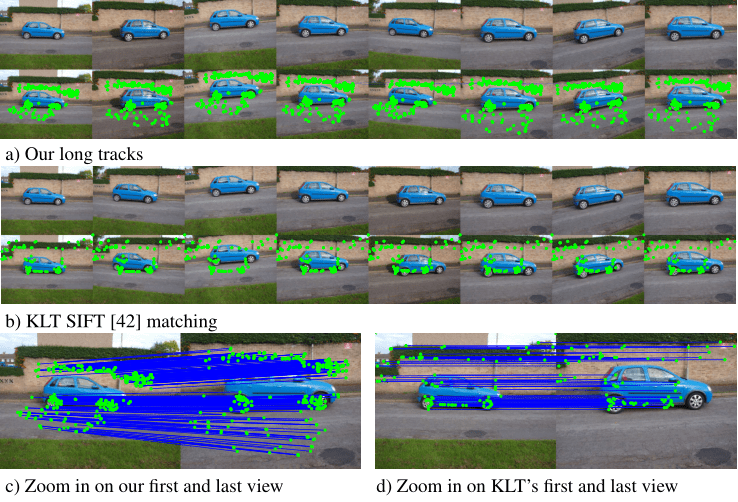
Matching across the car sequence. Observe that KLT-SIFT tracking drifts. A clear example can be seen at the car’s front wheel.
3. Needle in the Haystack
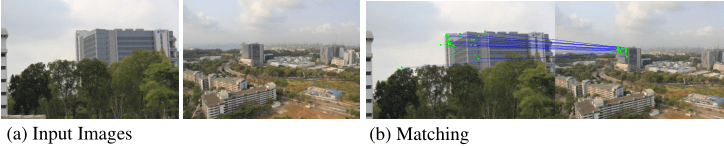
Examples of our algorithm localizing a template in a large image. Note that the template was taken at street level while the target image is from an overlooking roof.

![Recall and % outliers between image pairs, with varying algorithm parameters (diamonds indicate default parameters). Occ [25] is the baseline. The recall value where the curves first intersect outliers = 0 represents the maximum number of inliers that can be retained if no outliers are tolerated. Apart from highly repetitive scenes (blue and red curves), our curves are vertical lines on the outliers = 0 axis. Our default parameters provide over 90% recall with no outliers for many scenes.](https://i0.wp.com/mmcheng.net/wp-content/uploads/2014/07/bFunInOut.png?ssl=1)
![We compared our results against epipolar RANSAC [34] and MLESAC [35], implemented by [36]. We also evaluated piecewise homographic RANSAC (RCM homo) [18] and Occ [25], run at their default parameters.](https://i0.wp.com/mmcheng.net/wp-content/uploads/2014/07/bFunComp.png?ssl=1)